Вероятность ошибок в системах периметральной сигнализации
Основной характеристикой качества работы любой системы сигнализации и особенно систем периметральной сигнализации (СПС) справедливо считается тем или иным образом сформулированная оценка вероятности случайных ложных срабатываний системы.
В данной статье с общих теоретических позиций рассматриваются факторы, влияющие на величины вероятностей ошибок ложного срабатывания и пропуска целей в СПС. Также анализируются возможные методы уменьшения этих ошибок.
1. Ошибки I и II рода.
Работа системы сигнализации во времени может быть представлена как последовательность случайных событий {tn}, совершающихся в n-ом промежутке времени. При этом каждое событие tn может принимать одно из двух значений:
- поступил сигнал тревоги (tn = 1);
- не поступил сигнал тревоги (tn = 0).
Каждый из этих исходов может наблюдаться также при одном из двух возможных состояний периметра:
- Но - реально периметр в этот n-ый момент не нарушается;
- Н1 - в данный n-ый момент происходит проникновение через охраняемый периметр.
Исходя из принятых обозначений все возможные варианты решений могут быть сведены в следующую таблицу, где Р (Нi | Нj ) - вероятность того, что принимается решение в пользу гипотезы Нi , при том условии, что реально имеет место Нj ; (i, j = 0,1).
|
Реальное состояние периметра |
Решения: |
|
|
Принять Н1 |
Принять Н2 |
|
|
Справедливо Н0
Справедливо Н1 |
Правильное решение - Р (Н0 | Н0 )
Ошибки II рода (пропуск цели) P (Н0 | Н1) = Pβ |
Ошибки I рода (ложное срабатывание) –
Правильное решение - P (Н1 | Н1) |
Очевидно, что для любого интервала времени справедливо:
Р (Н0 | Н0 ) + P (Н1 | Н0) + P (Н0 | Н1) + P (Н1 | Н1) = 1
Тогда вероятность правильной работы системы:
Рr = Р (Н0 | Н0 ) + P (Н1 | Н1) = 1 – (Рα + Рβ ).
Из формулы видно, что вероятность правильной работы системы в равной степени зависит как от вероятности ошибки I рода (ложное срабатывание), так и от вероятности ошибки II рода (пропуск цели). Об этом часто забывают, требуя от разработчика и/или инсталлятора минимизировать только одну из ошибок – уменьшить вероятность ложного срабатывания Рα.
Иногда это возможно сделать только одновременно с увеличением вероятности пропуска цели Рβ.
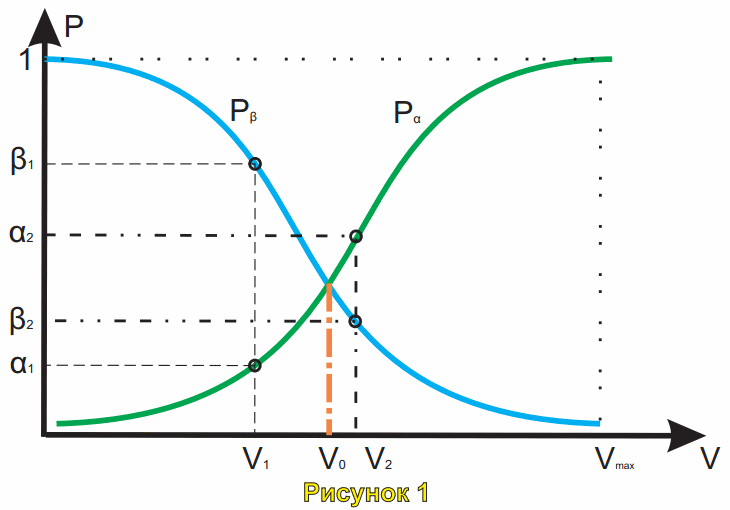
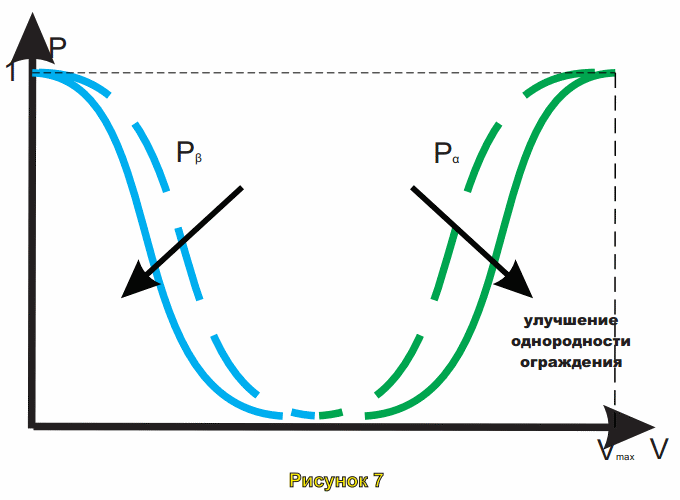
На рис. 1 показана зависимость функций распределения вероятностей Рα , Рβ от настройки порога срабатывания системы v. Если мы выбираем настройку v1, добиваясь заданной низкой вероятности ложного срабатывания α1 , мы можем получить недопустимо большую вероятность пропуска цели β1. И наоборот – настройка v2 .
Очевидно, что с точки зрения минимизации суммарной ошибки (максимизации вероятности правильной работы системы) следует предпочесть настройку v0 . Однако, здесь уместно отметить, что ошибки проявляют себя (воспринимаются сотрудниками охраны) сугубо по-разному. Большое значение вероятности ложного срабатывания Рα (настройка v2) означает также и большое беспокойство понапрасну сотрудников охраны. Поэтому через короткое время они психологически устают и перестают реагировать на каждое срабатывание системы (если вообще ее не выключат). И по факту оказывается, что вероятность правильной работы системы становится недопустимо малой и даже близкой к нулю Рr ~ 0 (Рr = 0, если систему выключают).
Возможна ситуация, когда вероятность правильной работы системы Рr также становится недопустимо малой, но только вследствие большого значения вероятности пропуска цели Рβ (настройка v1). Эта ситуация сама по себе без специальных проверочных мероприятий (и, следовательно, усилий) никак себя не проявляет. Не проявляет до наступления того момента, который и должна была предотвратить (но не предотвратила) система, и после наступления которого возможно уже «поздно пить «Боржоми».
Поэтому, если исходить из того, что возможные последствия, связанные с не обнаружением проникновения, объективно более значимы, чем неудобства и беспокойства сотрудников охраны, то следует предпочесть настройку v2 . Увы, на практике, в случае которому соответствует модель распределения ошибок, показанная на рис. 1, скорее всего, будет иметь место настройка v1 - сработает «человеческий фактор» (усталость сотрудников охраны).
Очевидно, чтобы избежать описанного конфликта, следует строить систему так, чтобы функции распределения ошибок Рα , Рβ не пересекались и взаимно располагались так, как это изображено на рис. 2.
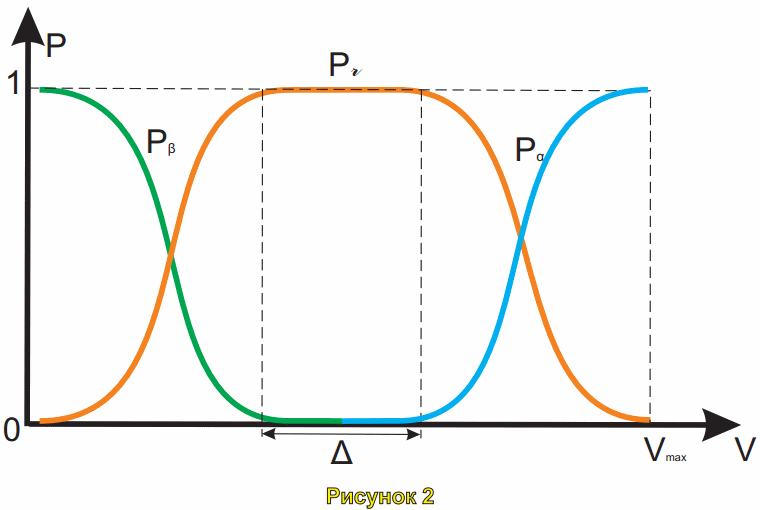
Тогда вероятность правильной работы системы в некоторой зоне настроек ∆ будет максимально приближена к 1.
2. Влияние на ошибки размера зоны охраны и длины периметра.
Взаимное расположение функций распределения ошибок Рα и Рβ зависит не только, и часто даже не столько от конкретного типа системы периметральной сигнализации (СПС). В значительной степени на него влияют основные параметры системы: величина (длина) каждой зоны охраны lохр и число этих зон (общая длина периметра). По той причине, что ошибки, возникающие в целом на охраняемом периметре, равняются сумме ошибок, возникающих в каждой из последовательно расположенных зон охраны. Поэтому при увеличении длины периметра (числа зон охраны), функции распределения ошибок I и II рода претерпевают изменения, отраженные на рис. 3.
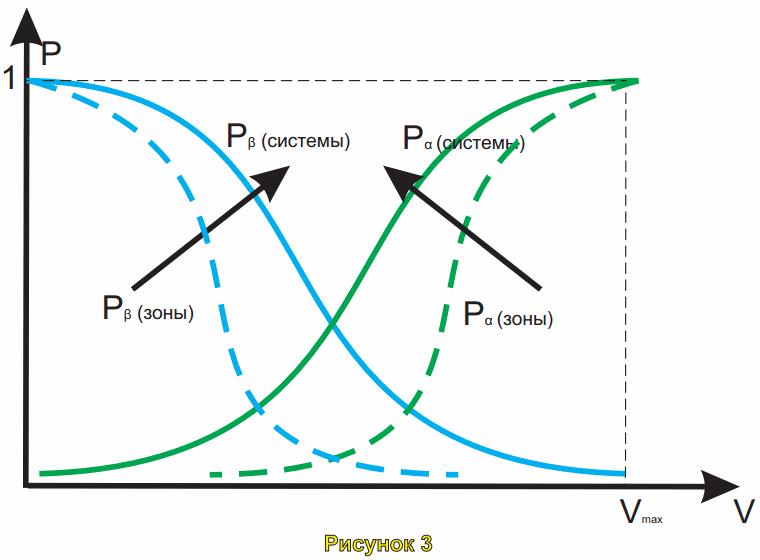
Аналогично рис. 3 ведут себя функции Рα , Рβ при увеличении длины каждой зоны.
Большое влияние на зависимости Рα , Рβ оказывает также качество строительно-монтажных работ.
Поясним все сказанное на примере рассмотрения процессов в широко применяемых сегодня кабельных вибрационных средствах обнаружения (КВСО). Хотя общая логика анализа и, с определенными оговорками, приведенные ниже рассуждения справедливы также и для других типов систем.
Вне зависимости от производителя и используемых им технологий, структура базового элемента (БЭ) СПС, построенной на базе КВСО, соответствует рис. 4.
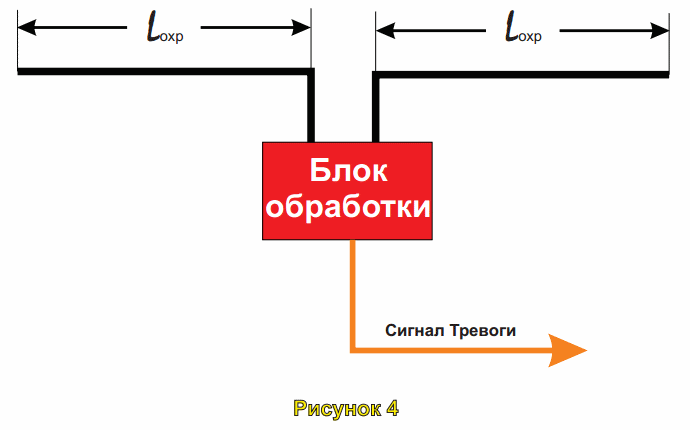
Опуская несущественные для данного рассмотрения детали, базовый элемент КВСО представляет собой некий блок обработки (БО), к которому подсоединены два плеча виброчувствительного кабеля длиной lохр, закрепляемого на ограждении. Возникающие при преодолении охраняемого периметра вибрации ограждения, воспринимаются этим специальным кабелем-сенсором. БО анализирует поступающий с него сигнал и вырабатывает (или нет) сигнал тревоги.
В случае, когда преодоление ограждения не происходит, шумовой сигнал, снимаемый с виброчувствительного кабеля (рис. 5а), меньше установленного порога чувствительности vо и выработка сигнала тревоги не происходит. В момент преодоления ограждения t3 вибрационный сигнал становится больше порога чувствительности vо и вырабатывается сигнал тревоги.
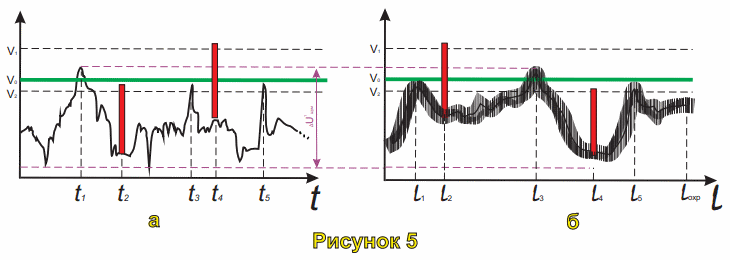
Пример, показанный на рис. 5б, показывает, как формируемые сенсорным кабелем сигналы распределены по его длине lохр. Такое представление дает понять, что помимо вибраций, вызванных преодолением ограждения на участке l2 и l4, на формирование сигнала влияют еще две группы причин, формирующих помеховый фон.
Первая группа обусловлена конкретной реализацией конструкции ограждения: тип ограждения (СЦП, «рабица», АКЛ, др.), особенности установки, влияющие на его вибрационные свойства (качество установки и крепления, особенности фундамента, натянутость сетки и т. п.), а также качество и правильность выполненного монтажа сенсорного кабеля на ограждении. Конкретная реализация периметрального ограждения формирует уникальные вибрационные свойства каждого его участка. Это означает, что по длине lохр каждого плеча сенсорного кабеля формируется зависимый от конкретной инсталляции некий квазипостоянный во времени уровень, относительно которого формируется сигнал вибрации, связанный как с преодолением ограждения, так и со второй группой причин – шумом, то есть со случайными мешающие факторами, вызывающими вибрацию ограждения и, следовательно, сенсорного кабеля, но не связанные с преодолением ограждения: ветер, осадки, движущиеся мимо пешеходы и транспорт, садящиеся на ограждение птицы и т. п.
Показанный на рис. 5 модельный сигнал демонстрирует также примеры возникновения ошибок:
- в момент t2 произошло воздействие на ограждение в зоне l2. Однако, уровень возникшего сигнала, несмотря на такую же силу воздействия, оказался недостаточен для выработки сигнала тревоги – имеет место ошибка пропуска цели;
- в момент t1 (на участке l3) за счет случайной помехи оказался превышен порог чувствительности vo , в результате произошло ложное срабатывание системы.
Также Рис. 5а иллюстрирует на примере обработки сигнала, как влияет регулировка порога срабатывания v на вероятность ошибок Рα , Рβ (см. также Рис.1). Устанавливая большую чувствительность v2 , мы имеем шанс не пропустить сигнал тревоги в момент t2 (он возник на участке l4 ), однако при этом увеличивается число ложных срабатываний (моменты t3 , t5). Напротив, меньшее значение чувствительности v1 ложные срабатывания убирает (в том числе и в момент t1), но мы имеем риск потерять сигнал тревоги и в момент t4 (участок l2) .
3. Методы уменьшения вероятностей ошибок.
Какие идеи и методики можно предложить кроме понятных общих стремлений улучшить качество всех компонентов для того, чтобы одновременно, а не за счет друг друга уменьшать ошибки Рα и Рβ .
Первый путь – выровнять вибрационные свойства системы «ограждение + кабель» по длине каждого плеча. При этом разброс уровней шума уменьшится (рис. 6), что даст возможность за счет регулировки порога срабатывания «увидеть» пропускавшийся ранее сигнал.
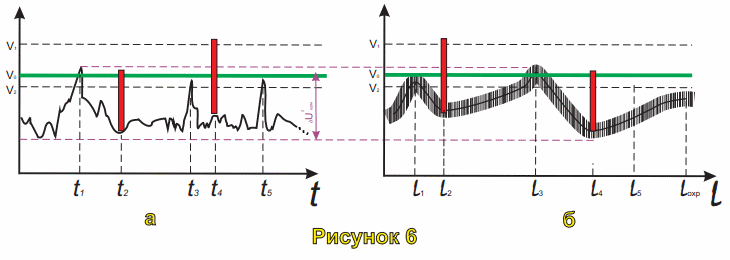
Рис. 6 показывает, что за счет более равномерно распределенных вибрационных свойств ограждения, уменьшился общий разброс значений сигнала (∆ U2 < ∆ U1). За счет этого оказалось возможным обнаружить второй тревожный сигнал (момент t2 , участок l4), поскольку его величина осталась неизменной. Однако это не помогло избавиться от ложного срабатывания в момент t1, участок l3.
Изменяются при этом в лучшую сторону и функции распределения ошибок, рис. 7.
В практическом плане для реализации этого предложения необходимо максимально однородно (в смысле вибрационных свойств) выполнить установку ограждения и также очень качественно и также однородно по всей длине осуществить крепление сенсорного кабеля. Поэтому (а не только для увеличения стоимости проекта) инсталляционные фирмы предлагают заказчику монтаж СПС вместе с установкой ограждения. Тем более что некоторые из представленных СПС очень чувствительны к неравномерности вибрационных свойств ограждения.
Предложение заново сделать ограждение значительно повышает стоимость СПС, и потому обычно не принимается. Тем более, что, хотя ошибки в работе системы уменьшаются, этим путем невозможно кардинально (в разы, а еще лучше на порядок) улучшить характеристики системы – в первую очередь допустимую длину охраняемого периметра.
Еще одно предложение для уменьшения влияния разброса шумовой составляющей сигнала заключается в том, чтобы по всей длине каждой охранной зоны lохрсоздать несколько локальных зон чувствительности (ЗЧ) ∆li c индивидуальной настройкой порога срабатывания в каждой - рис. 8б.
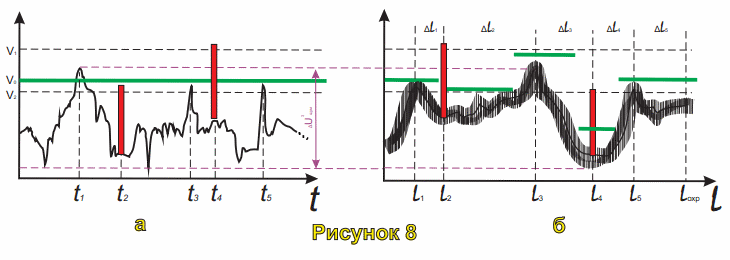
Следуя этим путем, не потребуется замена ограждения, поскольку в каждой ЗЧ будут учтены все ее уникальные особенности, влияющие на вибрационные свойства. Разумеется, что этот учет потенциально может быть тем точнее, чем меньше самой размер ЗЧ ∆ li. Желательно в идеале, чтобы ее длина могла доходить до 1..3 м – длины одной секции ограждения.
В практическом плане возможны два способа осуществления этого подхода: аппаратный и программный.
В варианте аппаратного пути каждое плечо сенсорного кабеля длиной lохр должно быть заменено, в соответствии с приведенной формулой, суммой из N отрезков кабеля меньшей длины ∆ li. Это означает, что вместо одного базового элемента (рис. 4) на той же длине периметра 2loхр должно быть установлено N базовых элементов.
Очевидно, что из чисто практических соображений, в первую очередь, ценовых, обеспечить таким путем малые величины ЗЧ невозможно (при желаемых размерах ЗЧ в 1..3 м стоимость системы вообще достигнет астрономических значений). Поэтому на практике, этот аппаратный прием оказывается неприемлемым. По факту ЗЧ оказывается равной loхр , которая, определяется из других соображений: в первую очередь стоимости системы, тактики охраны и требований со стороны системы телевизионного наблюдения. У всех производителей вибрационных СПС максимально допустимая длина плеча кабеля 200 – 250 м. Наиболее часто применяется
loхр =50…100 м.
Второй способ задания размера ЗЧ – программный. Предполагается, что СПС сконструирована таким образом, что БО обеспечивает распознавание сигналов вибрации, поступающих с каждого участка сенсорного кабеля, и для каждой программно же задаваемой ЗЧ устанавливается свой порог срабатывания (рис. 8б). Описанная возможность будучи осуществленной одновременно и без дополнительных затрат позволит решить по крайней мере и еще две важнейшие задачи:
- определять место проникновения с точностью, сопоставимой c размером ЗЧ (например, с точностью до 3 м);
- эффективно бороться с интегральными воздействиями, затрагивающими сразу несколько (много) рядом расположенных ЗЧ (ветер, осадки, проходящий транспорт и т. п.). Программный анализ и сопоставление сигналов от соседних ЗЧ позволит не воспринимать, как сигналы тревоги, пусть даже мощные, но приблизительно одинаковые, воздействия на соседние участки.
Чтобы количественно оценить в первом приближении эффективность этого способа уменьшения вероятности ошибок, приведем следующее правдоподобное рассуждение.
Мы показали, что чем больше длина кабеля, тем больше разброс случайных флуктуаций сигнала ∆U (рис. 5), идущего с кабеля, и тем, соответственно, выше вероятность ошибок (рис. 7). Предположим, (не имея, строго говоря, на то оснований), что эта зависимость между длиной кабеля и вероятностью возникновения ошибки прямая пропорциональная, а случайные флуктуации, вызывающие ошибки, однородно и стационарно распределены по длине loхр плеча сенсорного кабеля. При этих условиях виртуально разобьем обычно используемое значение loхр=50…100м на 50…100 ЗЧ размером 1м и индивидуально настроим чувствительность в каждой из них. В результате, в рамках сделанных предположений, вероятность ошибок в каждой ЗЧ уменьшится в 50… 100 раз. Суммарно по длине loхр всего плеча кабеля вероятность ошибок также существенно, в разы уменьшится. По нашему опыту работы, как минимум на порядок!
3. Выводы:
1. Вероятности ошибок системы периметральной сигнализации (СПС) I и II рода (вероятность ложного срабатывания и вероятность пропуска цели) в одинаковой степени влияют на значение вероятности правильной работы системы.
Эти ошибки обнаруживают себя по-разному. Ошибки ложного срабатывания проявляются без каких-либо действий со стороны персонала. И, если сигнал тревоги возникает слишком часто, охранники его перестают замечать.
Для обнаружения и оценки ошибки пропуска цели необходимы специальные мероприятия со стороны пуско-наладчиков или службы эксплуатации. Даже тогда, когда вероятность пропуска цели недопустимо велика, это обстоятельство без специальных усилий может быть не обнаружено, хотя СПС при этом объективно следует признать неработоспособной.
В силу изложенных обстоятельств (или, не обращая на них внимания), в процессе настройки СПС может минимизироваться только вероятность ложного срабатывания, что влечет рост вероятности пропуска цели и, как следствие, уменьшение вероятности правильной работы системы.
2. Ошибки ложного срабатывания и пропуска цели СПС в целом состоят из суммы соответствующих ошибок, возникающих на каждом из участков периметра. В силу этого даже в случае идеально выполненного ограждения (его качество конечно влияет на вероятность ошибок) для каждого из средств СПС существует предельная длина периметра (предельное число участков охраны), до значения которой построенная система имеет приемлемые значения вероятностей ошибок ложного срабатывания и пропуска целей. Для большинства представленных на рынке кабельных вибрационных средств обнаружения эта предельная длина периметра не превосходит 1..3 км.
3. Значения вероятностей ошибок для кабельных вибрационных средств обнаружения могут быть уменьшены, если вибрационные свойства системы «ограждение + сенсорный кабель» максимально одинаковы по все длине плеча кабеля. Для этого требуется качественное исполнение ограждения, состоящего из одинаковых секций с одинаковыми характеристиками, а также качественное, максимально идентичное по всей длине крепление сенсорного кабеля.
4. Альтернативный, более мощный и менее затратный путь борьбы с ошибками – применение системы, позволяющей на программном уровне, учесть уникальные вибрационные особенности каждого элемента уже инсталлированного ограждения и СПС с желаемой точностью 1..3 м. В этом случае, несмотря на практически отсутствующие требования к однородности вибрационных характеристик системы «ограждение+кабель» вдоль периметра (вообще могут быть использованы ограждения из разных конструкций, разного качества) достигаются в разы, на порядок (!) лучшие результаты. При этом одновременно решается задача определения места проникновения с точностью, сопоставимой с размером одной секции ограждения (до 3 м).
Применение СПС, где использован этот способ борьбы с ошибками позволит устанавливать систему на существующее ограждение, благодаря чему общие затраты заказчика существенно снижаются.
5. Программный анализ и сопоставление (сравнение) сигналов, поступающих с каждого малого элемента ∆li уже инсталлированной системы, позволяет эффективно бороться с ошибками ложных срабатываний, вызванных интегрированными воздействиями на ограждение (ветер, осадки, вибрации от проходящего транспорта и пешеходов и т. п.)